Robot arm drawing the Aalto vase (0:44)
Robot arm dressed up with a sweater and hand. (0:15)
AALTO IN THE AFTERLIFE
SCARA drawing arm
JAN - MAY 2023 // INDEPENDENT PROJECT
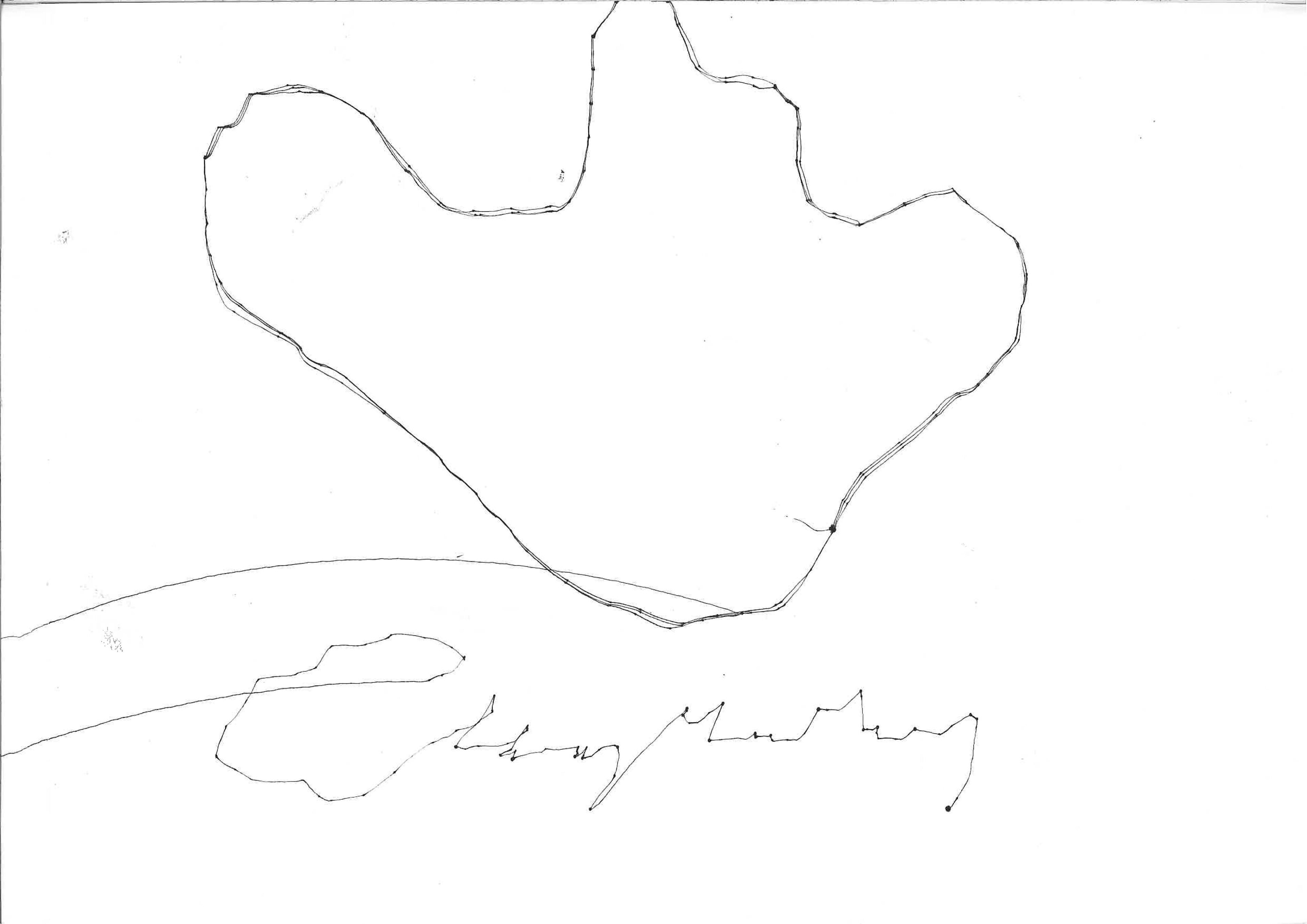
The Aalto vase and Alvar Aalto’s signature, as drawn by the robotic arm.
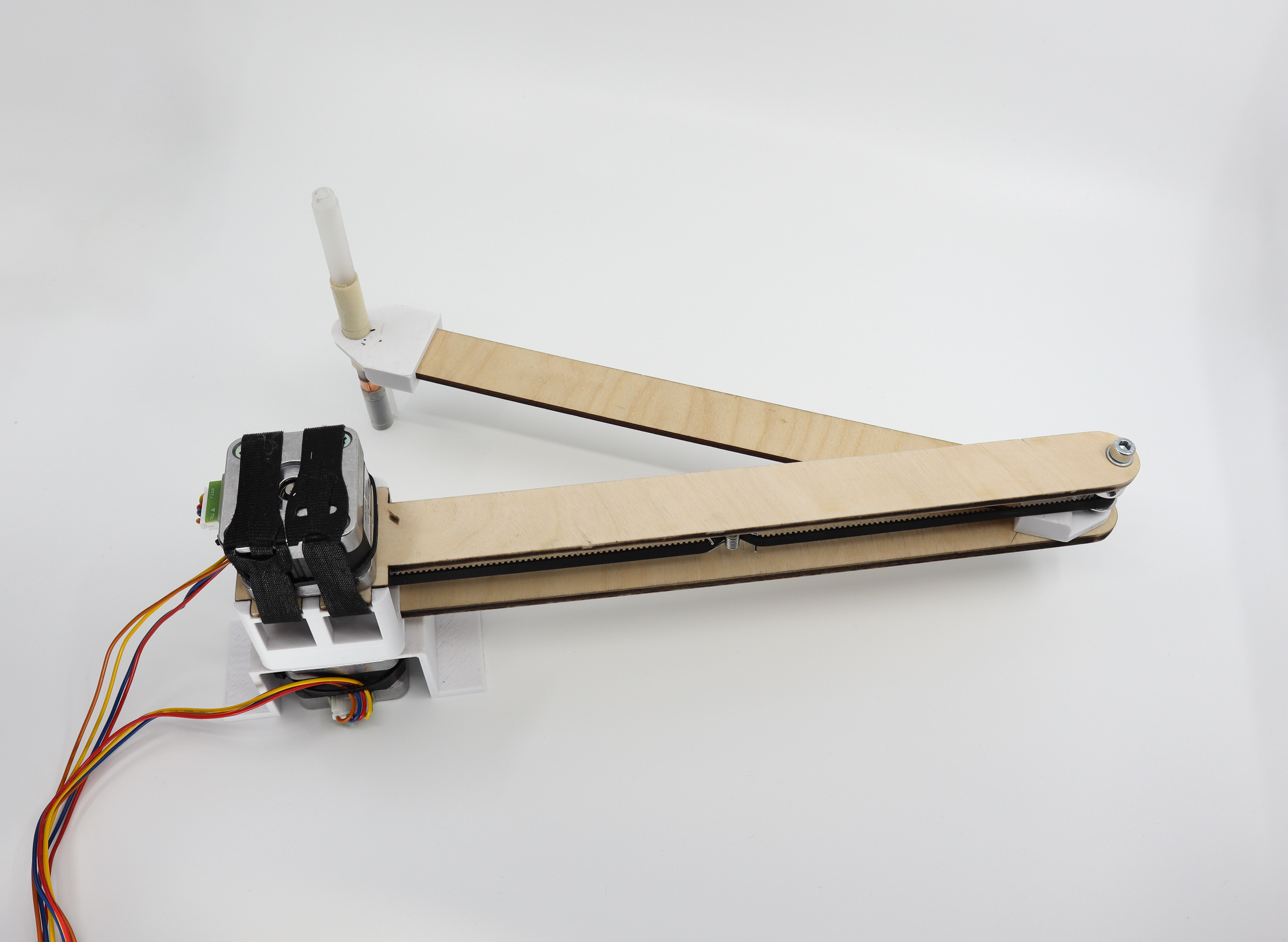
The robotic arm
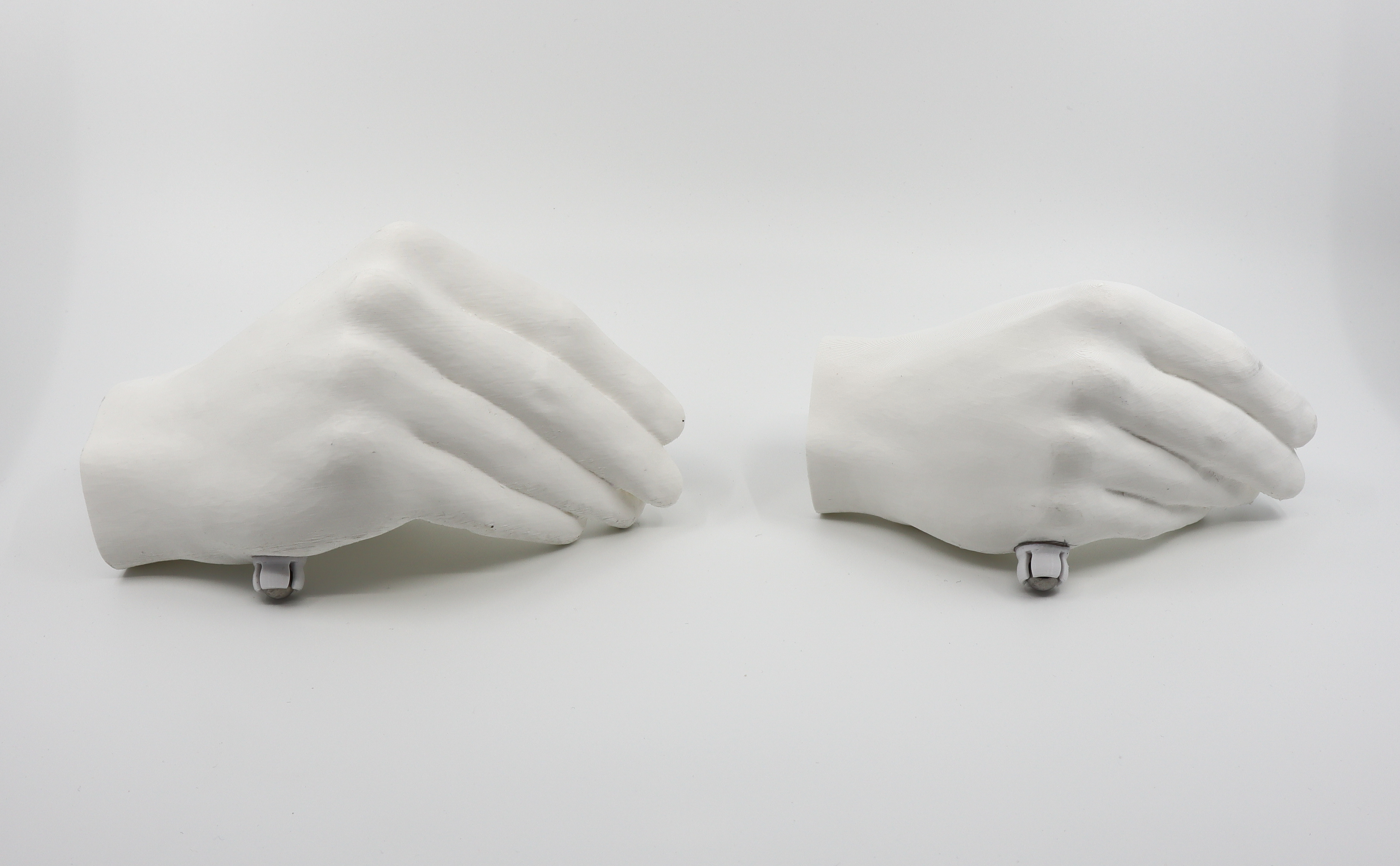
3D-printed prototypes of hands
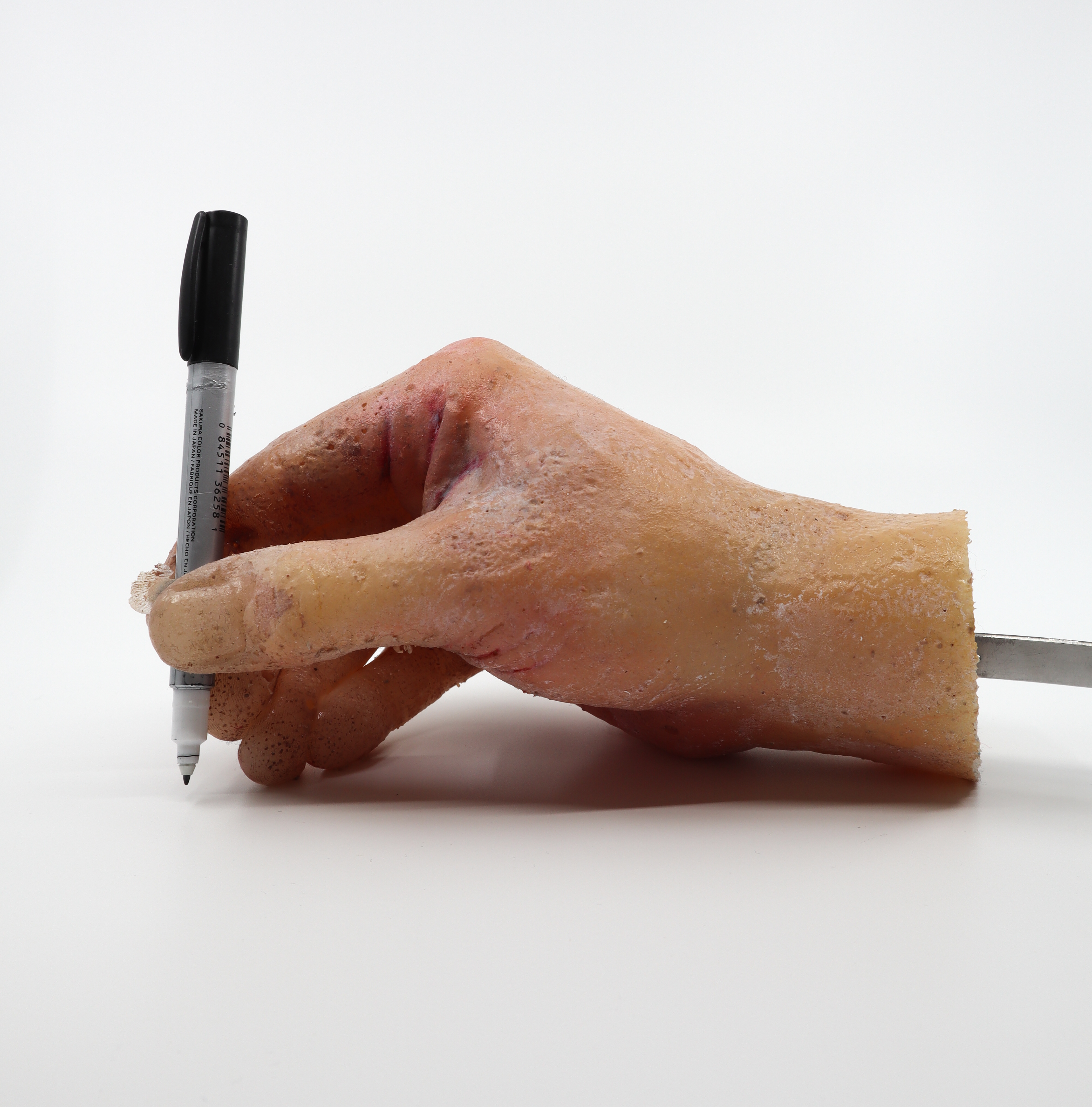
A realistic hand cast out of silicone and hand-painted. This is the final hand that will be mounted on the arm.

DESIGN PROCESS
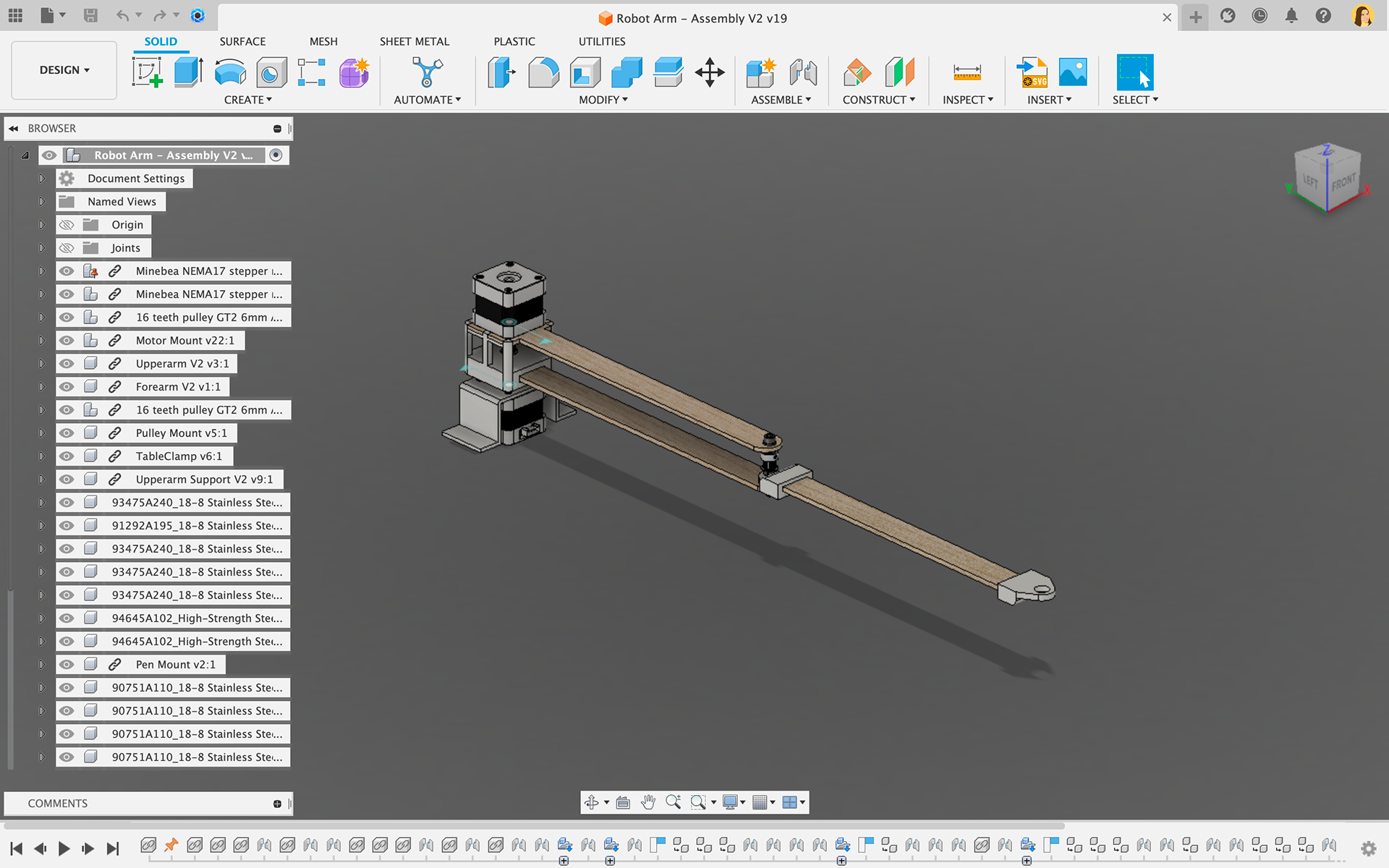
The complete CAD assembly (as of May 21, 2023)
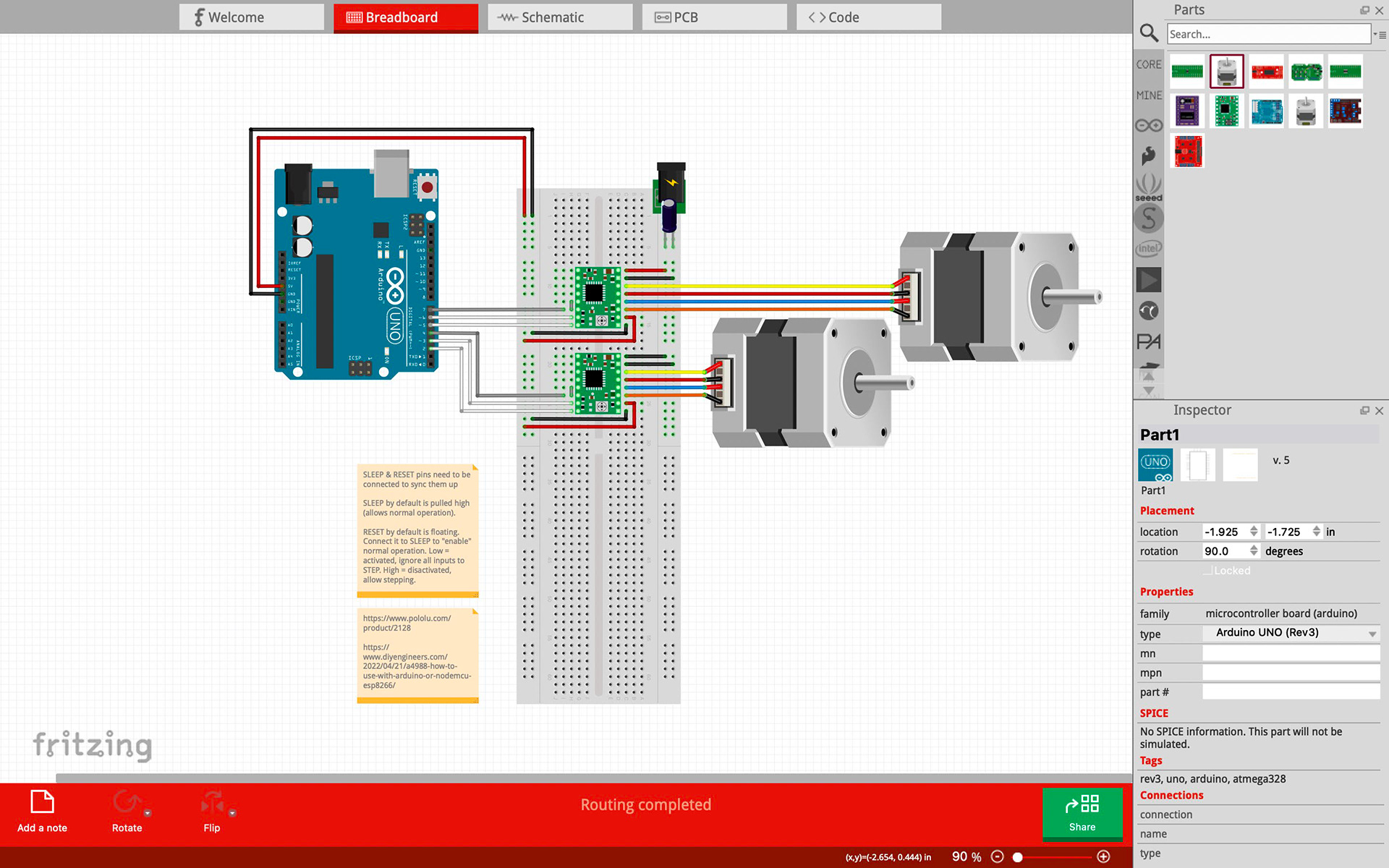
Diagram of the electronics (as of Mar 28, 2023)
BUILDING the Forearm and Hand
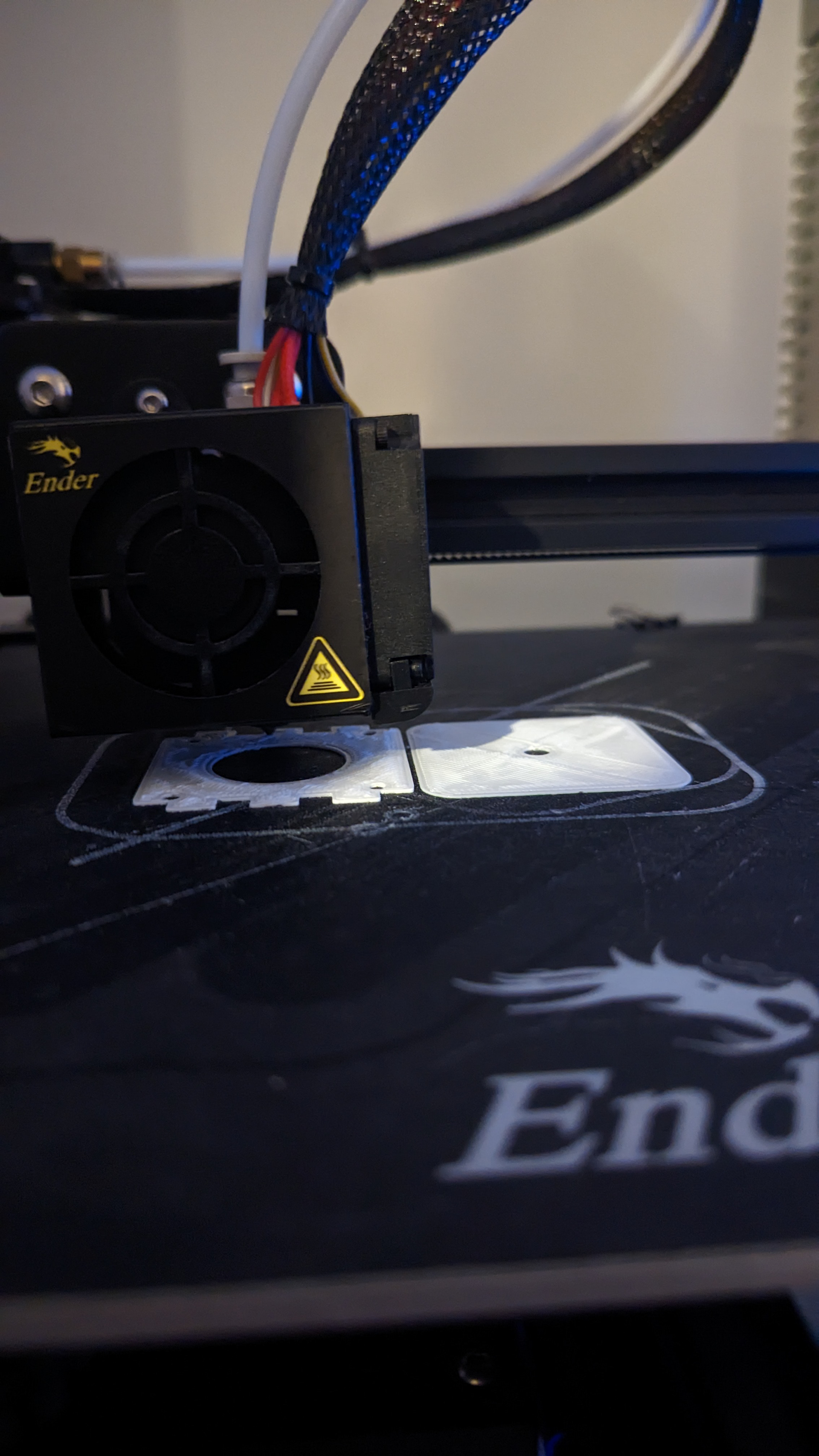
3D printing an early prototype of the motor mount
Laser cutting an arm piece
Sanding an arm piece
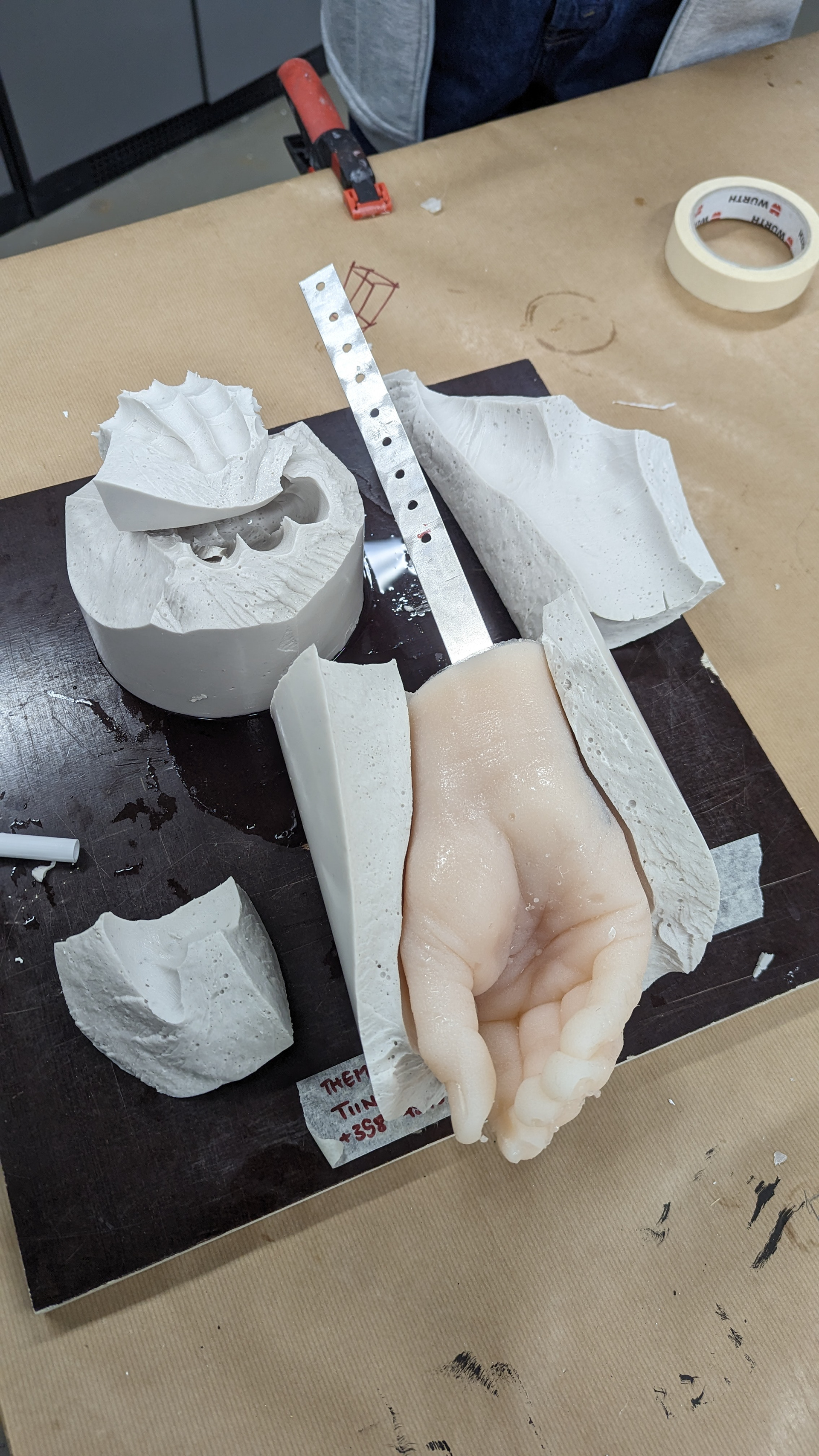
Life casting the silicone hand with an alginate mold
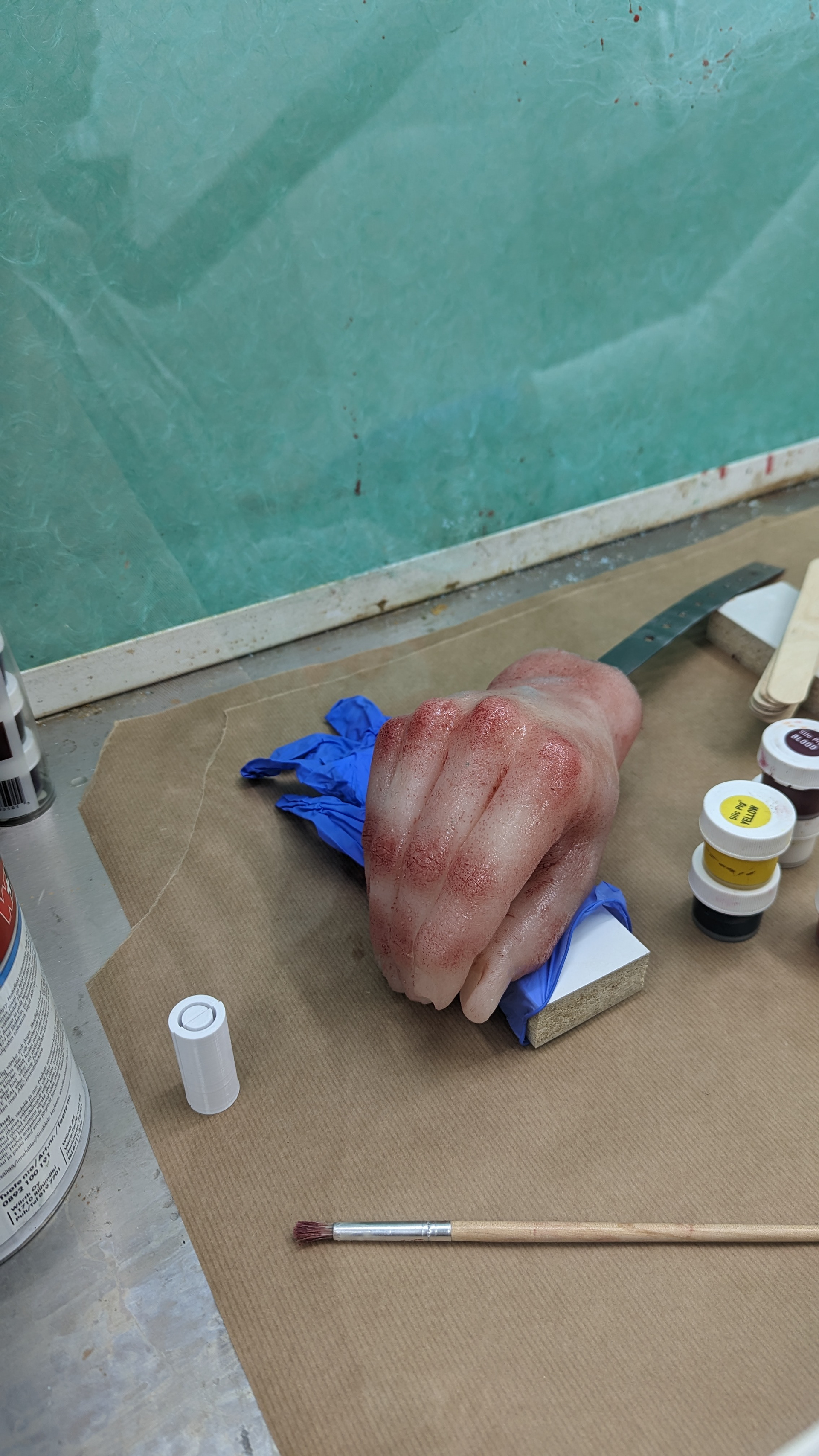
Painting the silicone hand
Cutting out a hole to mount the ball caster wheel
Testing the ball caster wheel
PROGRAMMING + TESTING

Testing the robot’s coordinate system against real-life measurements.
Testing the robot’s stability with the weight of a pen.
Checking the robot’s positioning with a simple simulation made in Desmos (0:11)
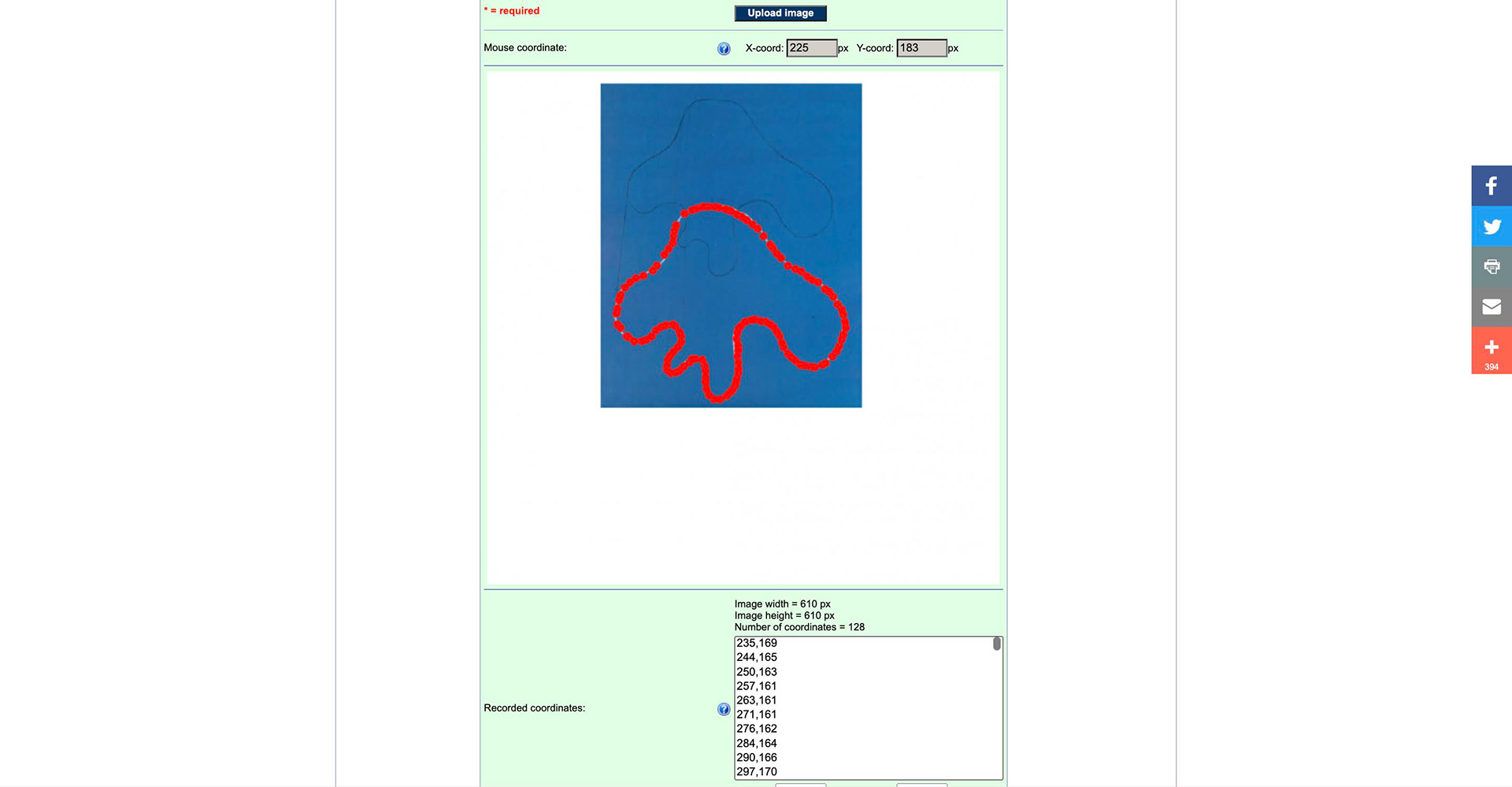
Generating coordinates for the robot to draw the Aalto vase